
Kuva:3Xtrim3X55TrainerC-IFUF46Rotax912Sinstallation.jpg
Wikipedia
Tarkempaa kuvaa ei ole saatavilla.
3Xtrim3X55TrainerC-IFUF46Rotax912Sinstallation.jpg (750×563 px, 122 KiB, MIME-tyyppi: image/jpeg)
Tämä kuvatiedosto on Wikimedia Commonsista ja se on Wikimedia-projektien yhteiskäytössä. Kuvan sivulla Commons-wikissä on lisätietoja kuvasta ja sen käyttöoikeustiedot.
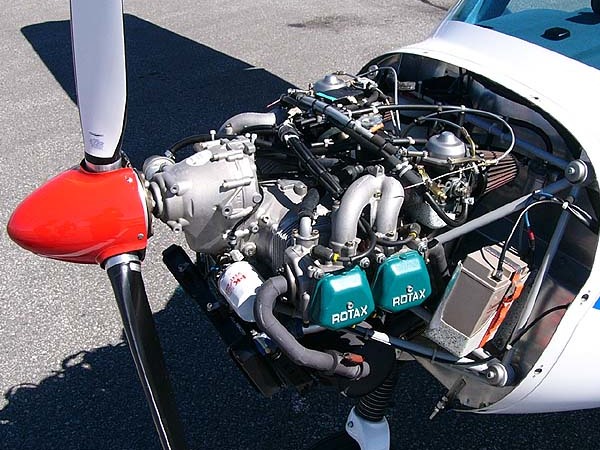
- Description: Rotax 912S
- Source: en:User:Ahunt who released it into the PD
photo of a 3Xtrim 3X55 Trainer on 21 August 2006 at Peterborough, Ontario
| This file has been (or is hereby) released into the public domain by its author, User:Ahunt. This applies worldwide.
In case this is not legally possible: العربية | Български | Česky | Dansk | Deutsch | Ελληνικά | English | Español | فارسی | Français | Italiano | 日本語 | Nederlands | Polski | Português | Русский | Svenska | Türkçe | Українська | 中文 | 中文(台灣) | +/- |
Tiedoston historia
Päiväystä napsauttamalla näet millainen tiedosto oli sillä ajan hetkellä.
| Päiväys | Koko | Käyttäjä | Kommentti | |
|---|---|---|---|---|
| nykyinen | 2. lokakuuta 2006 kello 09.03 | 750×563 (122 KiB) | Stahlkocher | (*'''Description:''' Rotax 912S *'''Source:''' en:User:Ahunt who released it into the PD photo of a 3Xtrim 3X55 Trainer on 21 August 2006 at Peterborough, Ontario {{PD}} Category:Aircraft piston engines Category:3Xtrim ) |
Viittaukset sivuilta
Seuraavilta sivuilta on linkki tähän tiedostoon:
Sisältökuvaukset
Tämä tiedosto sisältää esimerkiksi kuvanlukijan, digikameran tai kuvankäsittelyohjelman lisäämiä lisätietoja. Kaikki tiedot eivät enää välttämättä vastaa todellisuutta, jos kuvaa on muokattu sen alkuperäisen luonnin jälkeen.
| Kameran valmistaja | Panasonic |
|---|---|
| Kameran malli | DMC-FZ2 |
| Valotusaika | 1/400 s (0.0025) |
| Aukkosuhde | f/4 |
| Luontipäivämäärä | 21. elokuuta 2006 kello 10.11 |
| Linssin polttoväli | 4.6 mm |
| Suunta | Normaali |
| Kuvan resoluutio leveyssuunnassa | 72 dpi |
| Kuvan resoluutio korkeussuunnassa | 72 dpi |
| Käytetty ohjelmisto | Adobe Photoshop 7.0 |
| Viimeksi muokattu | 24. syyskuuta 2006 kello 18.12 |
| Y:n ja C:n asemointi | 2 |
| Valotusohjelma | Perusohjelma |
| Herkkyys (ISO) | 50 |
| Exif-versio | 2.2 |
| Digitointipäivämäärä | 21. elokuuta 2006 kello 10.11 |
| Kuvan pakkaustapa | 4 |
| Suljinaika | 8.644 |
| Aukko | 4 |
| Valotuksen korjaus | 0 |
| Suurin aukko | 3 |
| Mittaustapa | Kuvio |
| Valolähde | Päivänvalo |
| Salama | 16 |
| Väriavaruus | sRGB |
| Mittausmenetelmä | Yksisiruinen värikenno |
| Muokattu kuvankäsittely | Normaali käsittely |
| Valotustapa | Automaattinen valotus |
| Valkotasapaino | Automaattinen valkotasapaino |
| Digitaalinen suurennoskerroin | 0 |
| 35 mm:n filmiä vastaava polttoväli | 35 |
| Kuvan kaappaustapa | Perus |
| Kontrasti | Normaali |
| Värikylläisyys | Normaali |
| Terävyys | Normaali |
| Kohteen etäisyysväli | Tuntematon |


{kind=link}
{kind=link}
{kind=link}
{kind=link}